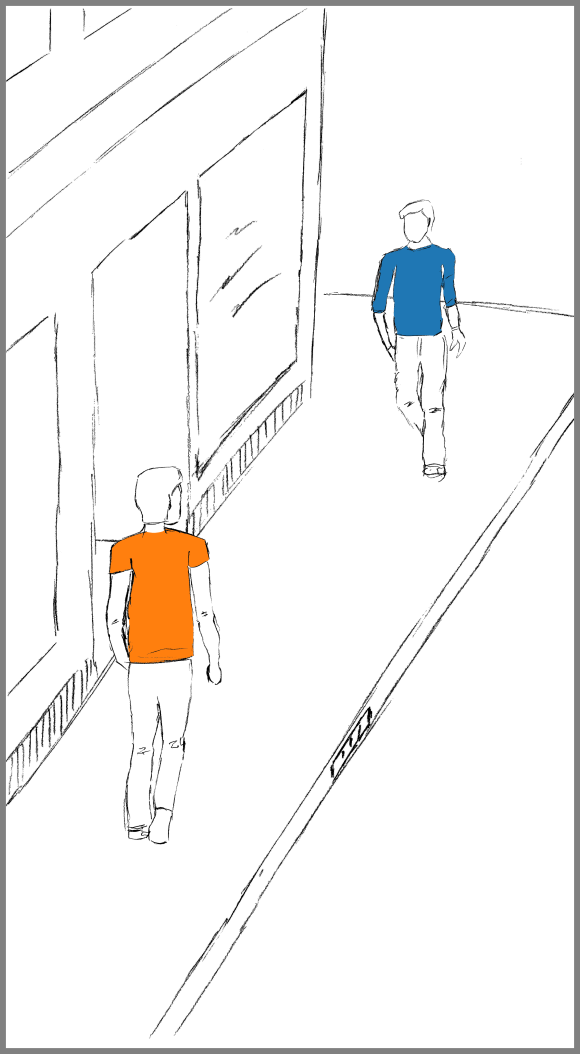
My work focuses on the interactions between mobile robots and pedestrians in everyday scenarios. I strive to understand non-verbal human interactions by creating pedestrian models that describe how people implicitly negotiate how to pass without bumping into each other, such as in the scenario on the right (figure from "A Model of the Sidewalk Salsa"). These models are based on a framework I developed earlier: the Communication-Enabled Interactions (CEI) framework. This framework assumes that humans have deterministic plans for their future movements and a probabilistic belief about the plans of others. This belief is formed based on communicative cues people observe. The combination of plan and belief results in a perceived risk that humans are assumed to monitor continuously. When the risk exceeds a personal threshold, they update their plan to lower the risk. I previously applied this framework to drivers in merging interactions, and am currently investigating its use for pedestrians.
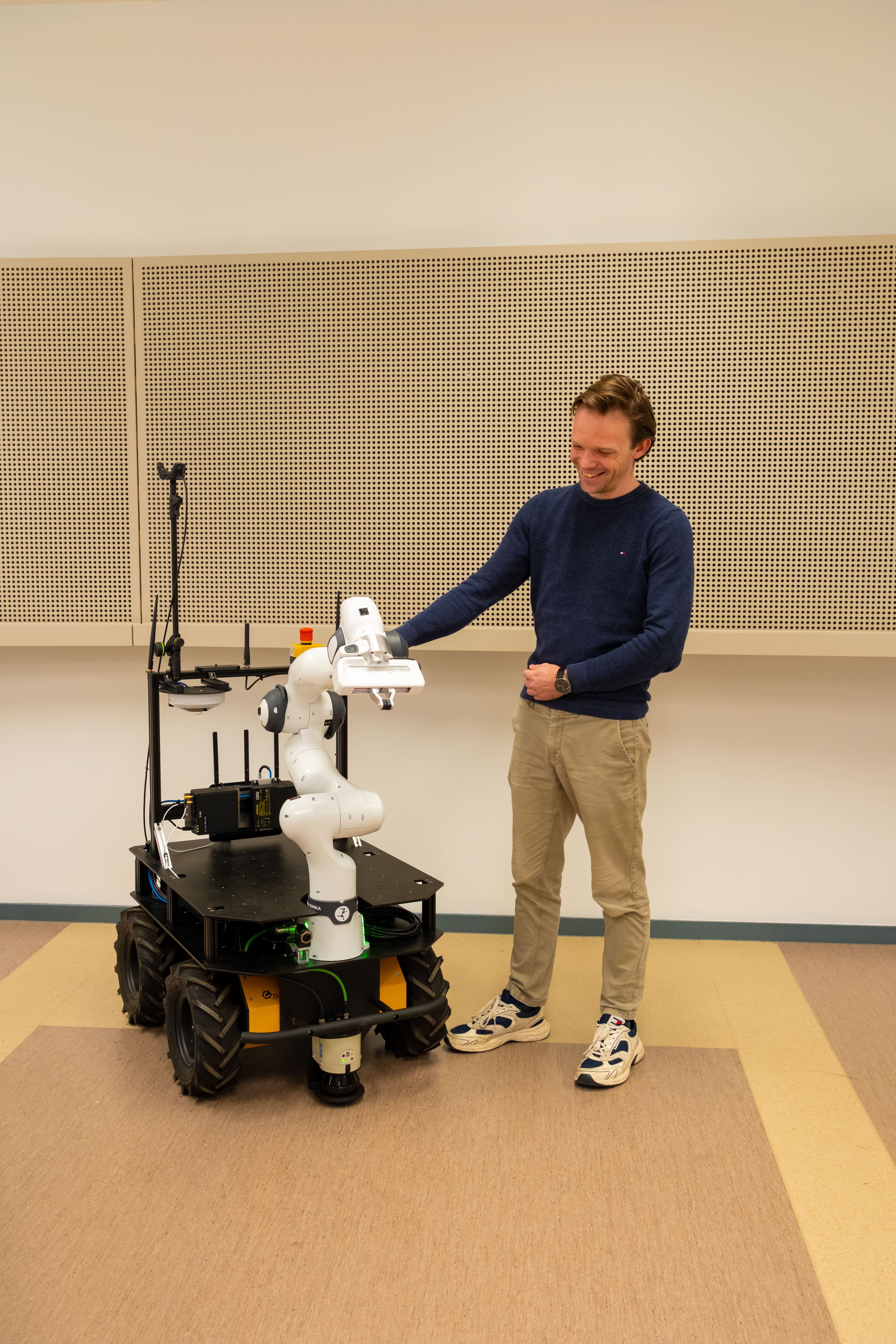
In addition to providing a better understanding of human behavior, my goal is to incorporate these models in decision-making for mobile robots (such as the one on the left). It will not only allow robots to understand communicative cues sent by other pedestrians, but also to adjust their own behaviour to be better understood. That way, robots can behave safely and communicate their intent naturally in various real-world scenarios. However, the CEI framework does not adhere to the assumptions made by Game Theory, which are commonly used in interaction-aware robotic path planners as well. Therefore, new path planning algorithms should be developed to leverage a CEI model for social robot navigation, which is the current focus of my research.
I'm a big fan of open science, and I strongly believe in publishing datasets and software for everyone to use. I also enjoy combining cutting-edge research with education, such as working on projects with master's and bachelor's students. If you have any ideas for potential collaborations, please don't hesitate to contact me!